
Mit Förderung vom Bundesministerium für Bildung und Forschung (BMBF) hat Zeiss in einem Konsortium mit den Partnern BMW, dem Institut für Mess-, Regel- und Mikrotechnik (MRM) an der Universität Ulm sowie dem Institut für Lasertechnologien in der Medizin und Messtechnik (ILM) in einem Forschungsprojekt das Konzept eines autonomen Messroboters (Aumero) erforscht und entwickelt. Ein voll funktionales Exemplar hat dieses Jahr bereits bewiesen, dass der Aumero Aufgaben wie etwa die Inspektion von Spaltmaßen und Bündigkeit an unlackierten oder lackierten Karosserieteilen in vollem Umfang bewältigen kann.
Forschungsprojekt für Automobilindustrie
„Eine starre Fertigungsstraße für ein Standardprodukt, auf der eine möglichst große Stückzahl produziert wird – dieses etablierte Konzept könnte schon bald von Gestern sein“, sagte Manuel Schmid, Produktmanager bei Zeiss IQS. Immer individuellere Kundenwünsche führen zu einer steigenden Variantenvielfalt bei Produkten und damit einer notwendigen Modularisierung bei deren Fertigung. Besonders davon betroffene Branchen wie der Automobilbau planen daher langfristig, sequenzielle Fertigungsprozesse mit hochspezialisierten Stationen in naher Zukunft aufzulösen und durch flexibel einsetzbare Fertigungsinseln zu ersetzen. Der autonome Messroboter erkennt mit Hilfe von Kameras sein Ziel selbstständig und richtet sich an der Karosserie aus, um Spalt und Bündigkeit an den gewünschten Positionen ohne menschliche Interaktion zu inspizieren.
Kombinierte Kompetenzen für autonomen Messroboter
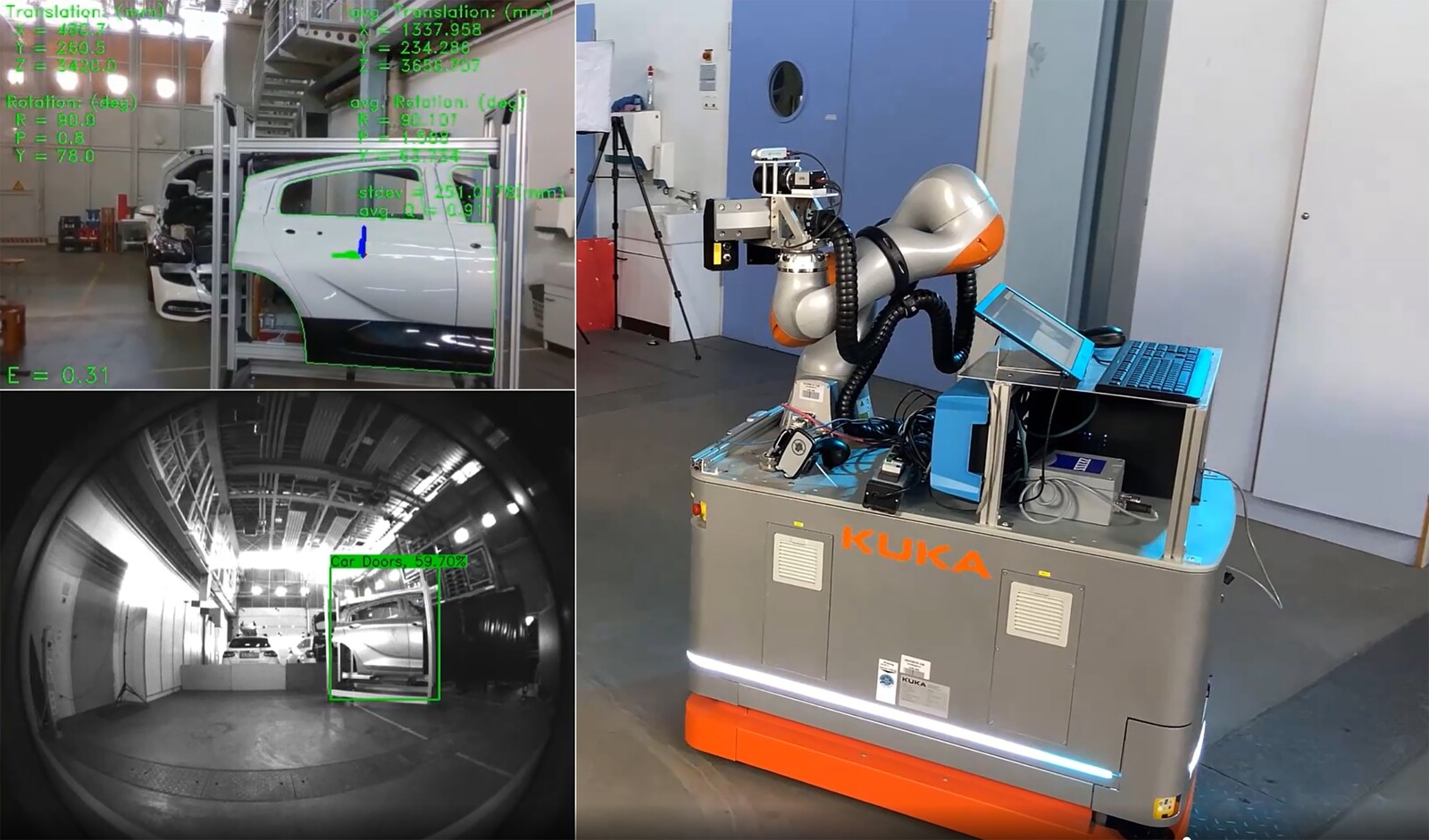
Der Aumero ist eine rechteckige Plattform mit Rädern unten und einem Roboterarm mit einem optischen Messsensor oben. „Dieser Hardwareaspekt ist für sich natürlich noch nicht revolutionär“, erklärt Dr. Matthias Karl von der Konzernforschung der Zeiss Gruppe. „Die wesentliche Aufgabe war, auf der Softwareseite die nötige Intelligenz für die autonome Bewegung zum Objekt, dessen Vermessung und die Datenverarbeitung zu erschaffen.“ Um diese Herausforderung in dem Forschungsprojekt zu meistern, legten die Forschungspartner ihre jeweiligen Kompetenzschwerpunkte zusammen. Das Institut für Mess-, Regel- und Mikrotechnik der Uni Ulm hat einen Fokus auf autonomes Fahren in Zusammenarbeit mit mehreren Automobilherstellern. Es erarbeitete und implementierte daher die Navigationslösung für die mobile Messplattform, durch die sie sich autonom zum Zielobjekt bewegen und dabei auch Hindernisse sicher umfahren kann. Das Institut für Lasertechnologien in der Medizin- und Messtechnik hat langjährige Erfahrungen in der optischen Messtechnik. Es erforschte und entwickelte eine Methode zur gleichzeitigen Vermessung von rohen, gefärbten und lackierten Karosserieteilen mit nicht-kooperativen Oberflächen mit demselben Messgerät. Zeiss als Verbundkoordinator war mit Zeiss Industrial Quality Solutions (IQS) und der Konzernforschung mit zwei Fachabteilungen vertreten: Zeiss IQS trug die anwendungsnahe optische Messtechnik bei, während die Zeiss Konzernforschung die Bewegung des Roboterarms, die Objekterkennung und Messposenansteuerung durch optische Bilderkennung in Verbindung mit maschinellem Lernen gewährleistete. Der Applikationspartner BMW als einer der führenden Premium-Automobilhersteller gab dem Projekt einen greifbaren Praxiskontext.
Autonome Mobilität und Objekterkennung
„Der Anwender wählt via Software ein Objekt, zum Beispiel eine Fahrzeugtür, dessen groben Standort und danach den relevanten Messplan. Ab diesem Punkt agiert Aumero voll autonom“, erklärt Manuel Schmid. Die Objekterkennung erfolgt via Kamera und basiert auf einem digitalen Zwilling des Objekts. Für die eigentliche Messung wird die mobile Plattform mit zusätzlichen optischen Sensoren ausgestattet: Dazu wurde am ILM ein spezielles Messgerät mit Vorteilen für kurze Messzeiten und robuste Umgebungseinflüsse entwickelt, das Mehrwellenlängen-Digitalholografie nutzt. Auf diese Weise können innerhalb eines Schnappschusses topografische Daten einer gesamten Fläche für diffus und/oder spiegelnd reflektierende Oberflächen gewonnen werden. Nachdem die Plattform das Objekt gefunden und angefahren hat, bewegt der Roboterarm den Messkopf gemäß den Erfordernissen aus dem Messprogramm unter Berücksichtigung der aktuellen räumlichen Gegebenheiten. „Durch seine Fähigkeit zur autonomen Mobilität und Objekterkennung ist Aumero bereit für eine Zukunft, in der mobile, modulare Fertigungsinseln die Regel sind, und erlaubt eine Messung immer dort und dann, wo sie gerade nötig ist“, sagt Schmid. „Er kann aber für Hersteller schon jetzt seine Vorzüge voll ausspielen, zum Beispiel bei Produktaudits, in denen derzeit Messung und Dokumentation händisch im Messraum erfolgt. Mit Aumero geht das viel effizienter, nämlich automatisiert und reproduzierbar mit konstant hoher Qualität und Aussagekraft der generierten Messergebnisse.“ „Wir haben mit dem Forschungsprojekt demonstrieren können, dass das Konzept ohne Einschränkung funktioniert und sich einfach auf neue Objekte und Messpläne adaptieren lässt. Damit sind die Türen für diese Technologie weit aufgestoßen“, sagt Gesamtverbundkoordinator Dr. Matthias Karl. Jan-Klaus Dziergwa, Projektleiter Karosseriebau, Qualitätsmanagement BMW Group, ist von dem Ergebnis begeistert: „Bei BMW sind wir hoch interessiert daran, individuelle Kundenwünsche zu erfüllen und zugleich unsere Effizienz während der Produktion und Qualitätssicherung immer weiter zu steigern. Das erfordert innovative Methoden und Technologien, und Aumero ist dafür ein hervorragendes Beispiel.“
ak