Die robotergestützte Automation hat sich in der Metallbearbeitung durchgesetzt. Hier übernehmen Roboter Aufgaben wie Fräsen und Entgraten. Oder sie setzen Bohrungen in komplexe Getriebegehäuse und schneiden anschließend mit hoher Präzision auch die Gewinde, damit die Gehäusehälften verschraubt werden können. Zu den Voraussetzungen gehört in diesem Fall ein genaues Einspannen und Fixieren des Werkstücks über den gesamten Prozess. Denn so vielseitig die Roboter auch sind, wenn die Bearbeitung begonnen hat, läuft das in der Steuerung hinterlegte Programm ab. Eine Umfelderkennung – beim Menschen selbstverständlich – fehlt. Deshalb sind die Ausgangsbedingungen exakt definiert und dürfen nicht verändert werden.
Anders ist das beim Dinamtrack-System, einer Entwicklung der spanischen Ingenieurgesellschaft E-Project 4 in Berga bei Barcelona, die sich auf die Automation von Metallbearbeitungsprozessen spezialisiert hat. Zum Beispiel wurde die CNC-Bearbeitungsstation Robmill entwickelt, bei der ein Roboter Dreh- und Fräsaufgaben übernimmt und die Befehle direkt aus der CNC-Steuerung erhält. Damit wird eine Voraussetzung für hervorragende Oberflächenqualität des Werkstücks geschaffen. Für dieses Projekt verwendet E-Project 4 Stäubli-Roboter vom Typ TX60. Ein Grund dafür ist die tiefe Integration der Roboter- mit der CNC-Steuerung über die von Stäubli entwickelte Unival-Schnittstelle.
3D-Bildverarbeitung bringt Flexibilität
Im Dinamtrack-Projekt haben sich die Ingenieure mit der erwähnten Aufgabe beschäftigt, das Einbringen von Bohrungen in Getriebegehäuse zu automatisieren – und dabei eine echte Innovation verwirklicht. Grundgedanke war der Wunsch, den Prozess auch dann automatisiert und fehlerfrei ablaufen zu lassen, wenn die Ausgangsbedingungen nicht hundertprozentig dem definierten Zustand entsprechen. Auf das konkrete Projekt bezogen heißt das: Die Bohrungen sollen genau so präzise eingebracht werden, wenn das Getriebegehäuse nicht korrekt eingespannt wurde.
Um das zu erreichen, müssen zwei Grundvoraussetzungen erfüllt sein. Eine 3D-Bildverarbeitung überwacht den Prozess und liefert der Steuerung die Ist-Daten, um den Prozess situativ abzuarbeiten. Der Roboter muss also quasi sehen können. Dazu wiederum muss das Getriebegehäuse mit Referenzpunkten versehen sein, die der Scanner erkennt. Diese Voraussetzungen hat E-Project 4 bei Dinamtrack geschaffen und auch zwei weitere Grundbedingungen erfüllt. Der Roboter muss sehr präzise arbeiten. Deshalb kommt auch beim Dinamtrack-Prototypen ein Stäubli-Roboter aus der TX-Serie zum Einsatz. Und es muss eine direkte Echtzeit-Verbindung zwischen Scanner, CNC-Steuerung und Robotersteuerung sichergestellt sein.
Gerades Bohren auch in Schrägstellung
Diese Anforderung lässt sich mit der Unival-plc-Schnittstelle von Stäubli erfüllen. Sie ermöglicht dem Anwender die Programmierung und Steuerung des Roboters über Funktionsbausteine einer SPS oder CNC-Steuerung. Diese übergeordnete Steuerung wiederum kann über einen Standard-Feldbus an andere Steuerungen angebunden sein – in diesem Fall an den 3D-Scanner. Für die Praxis und das Dinamtrack-Projekt bedeutet das: Über diese ebenso einfache wie leistungsfähige Architektur kann der Roboter seine Bewegungsabläufe an die in Echtzeit übermittelten Signale aus dem 3D-Scanner anpassen.
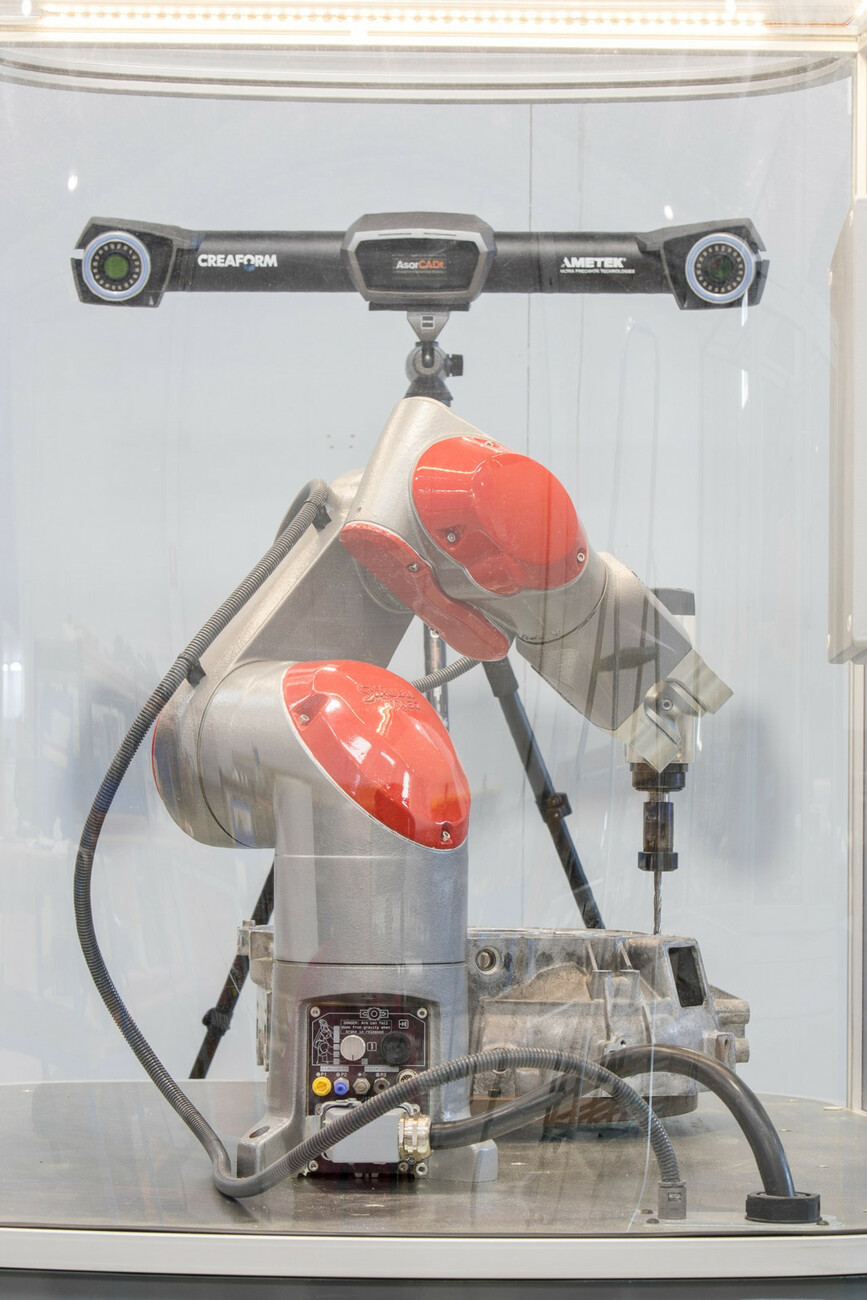
Welche Vorteile Dinamtrack bietet, wird beim Blick auf den Bearbeitungsprozess unmittelbar deutlich. Zunächst bieten sich dem Betrachter keine Überraschungen. Der Roboter, überwacht und gesteuert von einem 3D-Scanner, dem C-Tracker von Creaform, tastet die Löcher ab, in denen Gewinde gebohrt werden sollen. So weit, so normal. Was aber passiert, wenn zum Beispiel ein Bediener das Spannsystem öffnet und einen Keil unter das Gehäuse legt, das somit nicht mehr plan auf dem Werkstückträger fixiert ist? In diesem Fall nähert sich der Roboter wie gewohnt dem Werkstück. Nach kurzem Zögern, das heißt nach dem Empfang der Signale des 3D-Scanners, bringt er das Werkzeug in eine Schrägstellung, die ein exaktes, also gerades Eintauchen in das Bohrloch ermöglicht. Dies bedeutet: Das Werkzeug passt sich an die individuelle, sensorisch erfasste Position des Werkstücks an.
Daten vom 3D-Scanner werden mit dem 3D-Modell verglichen
Das gelingt, weil die externe Vermessung mit dem 3D-Scanner die reale Position des Werkstücks mit dem in der Steuerung hinterlegten 3D-Modell vergleicht. Die Robotersteuerung erhält dann als Input den „Offset“, den der Roboter bei der Positionierung des Werkzeugs und der Bearbeitung selbst berücksichtigt.
Als CNC-Steuerung wird bei diesem Projekt eine Siemens Sinumerik 840D verwendet. Sie übernimmt die Master-Funktion, während ihr die Robotersteuerung als Slave zugeordnet ist. Ein weiterer wichtiger Baustein ist dabei das Software-Modul VX-track von Creaform, das die vom externen Scanner erfassten Daten aufbereitet und ebenfalls per Feldbus an die CNC-Steuerung und damit über Unival plc auch an den Roboter sendet. Ohne dieses leistungsstarke und echtzeitfähige Interface ließe sich die Kombination von Roboter-, CNC- und Scanner-Steuerung nicht realisieren. Deshalb sind laut E-Project 4 auch Dinamtrack-Systeme mit größeren Robotern möglich, aber eben nur mit Stäubli-Robotern mit Unival-Schnittstelle wie dem TX200.
Ralf Högel/rk